
构造原理-精密减速机
齿轮型减速机的问题点
什么是减速机?
减速机,是把从电机等动⼒源得到的动⼒(通常是小的扭矩和高的旋转速度),通过齿数不同的齿轮啮合组合,减速后输出的装置,相对于速度降低的比例,扭矩被反比例增大。
电机理想的输出是定速回转,为了得到实际需要的低转速和大扭矩,通过减速机的减速作用和增加扭矩的作用就可以实现。
减速机构通过调整不同的齿数的齿轮的组合还是比较容易实现的,减速机就是包含减速机机构的组件装置。例如:(螺旋齿轮、伞齿轮、准双曲面齿轮)减速机、行星齿轮减速机、摆线减速机、谐波减速机、球减速机等。
电机理想的输出是定速回转,为了得到实际需要的低转速和大扭矩,通过减速机的减速作用和增加扭矩的作用就可以实现。
减速机构通过调整不同的齿数的齿轮的组合还是比较容易实现的,减速机就是包含减速机机构的组件装置。例如:(螺旋齿轮、伞齿轮、准双曲面齿轮)减速机、行星齿轮减速机、摆线减速机、谐波减速机、球减速机等。
背隙的存在
减速机在使用渐开线齿轮的情况下,背隙(Backlash)是不可或缺的存在。
为了实现零背隙,减速机的构成部件之间微小的间隙也不允许存在,必须常时处于接触状态。
为了实现零背隙,减速机的构成部件之间微小的间隙也不允许存在,必须常时处于接触状态。
背隙存在时候的劣势和问题点
- 背隙(定位精度恶化)
- 因为敲齿而产生噪音、振动
- 啮合部位产生磨损、粉尘

向高精度、高性能追求的机械装置对减速机也同时提出多种性能要求
- 零背隙
- 小型、紧凑、小尺寸
- 高角度定位精度
- 高效率
- 低噪音
- 低振动
- 低惯性
- 高刚性
球减速机-BR系列、JFR系列、SFP系列
什么是球减速机?
球减速机是解决由齿轮构成的减速机的问题点的,具有“零背隙构造”的减速机。
1.使用钢球替代齿轮,常时滚动接触来传递动力。
2.动力传递部(啮合部位)通过施加预压实现背隙为零。
使用钢球进行动力传递,背隙为零的同时,并不增加摩擦,依然进行轻快的动力传递。
同样的设计思路在球轴承、滚珠丝杆、直线滚动导轨上同样发挥着钢球的优势。
1.使用钢球替代齿轮,常时滚动接触来传递动力。
2.动力传递部(啮合部位)通过施加预压实现背隙为零。
使用钢球进行动力传递,背隙为零的同时,并不增加摩擦,依然进行轻快的动力传递。
同样的设计思路在球轴承、滚珠丝杆、直线滚动导轨上同样发挥着钢球的优势。
球减速机的构造
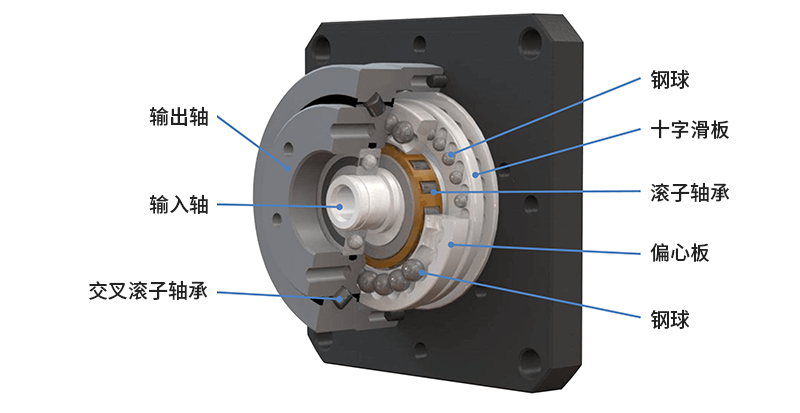
球减速机的构造:有点类似内外齿轮式的差速机构,但跟齿轮啮合型的动力传递不同,是通过钢球的转动来进行动力传递,动作圆滑并且很少摩擦。
另外几乎所有的钢球都参与动力传递,传动效率高。啮合部分施加预压,让传动部件之间间隙为零。
另外几乎所有的钢球都参与动力传递,传动效率高。啮合部分施加预压,让传动部件之间间隙为零。
球减速机的动作原理
球减速机是运用摆线原理的减速机。
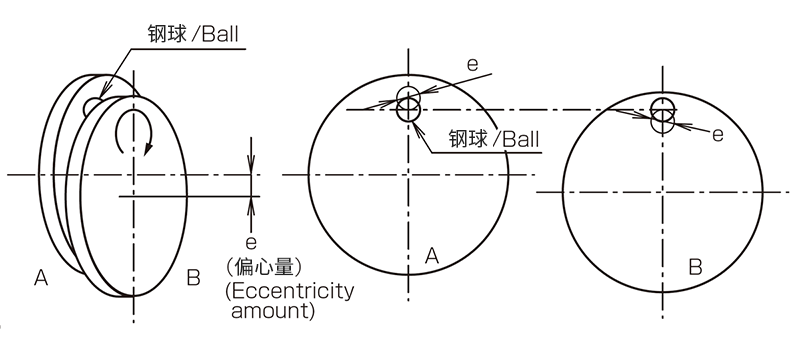
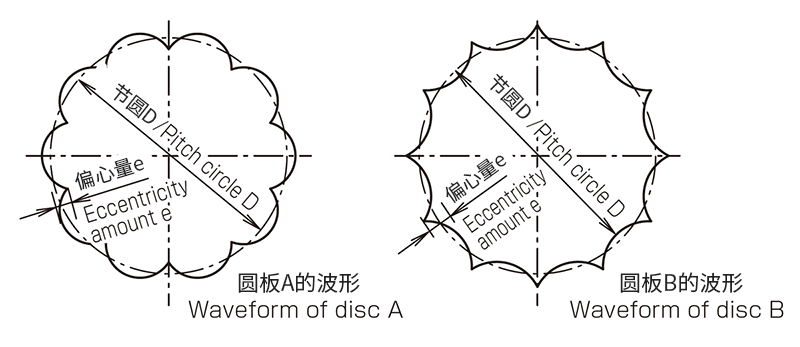
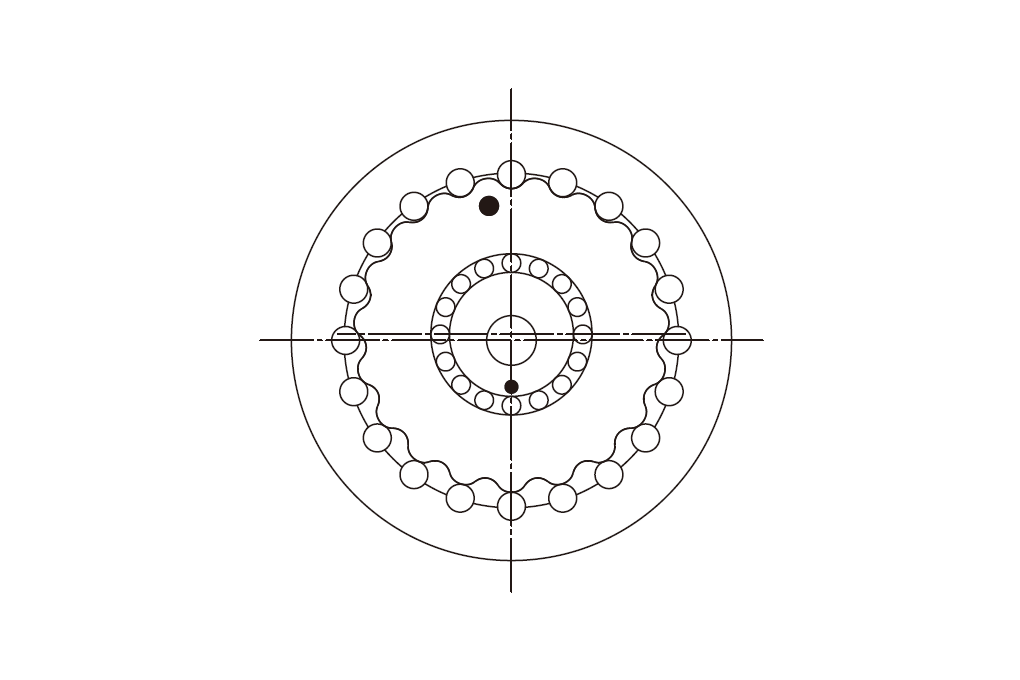
如图1,2块圆板夹住钢球,一方固定,另外一方按照偏心量e来进行公转,钢球就会在2块圆板上留下直径e的圆形滚动轨迹。
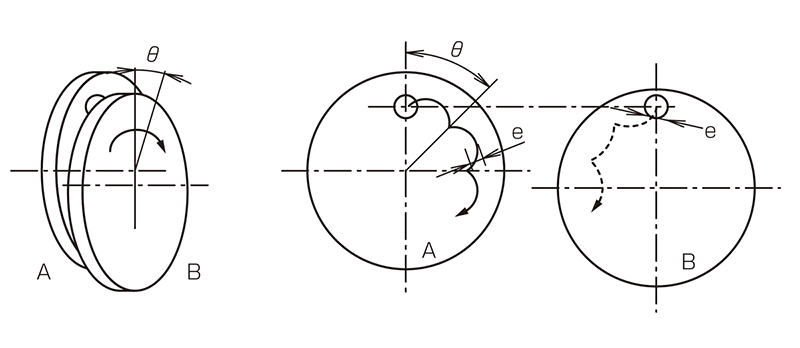
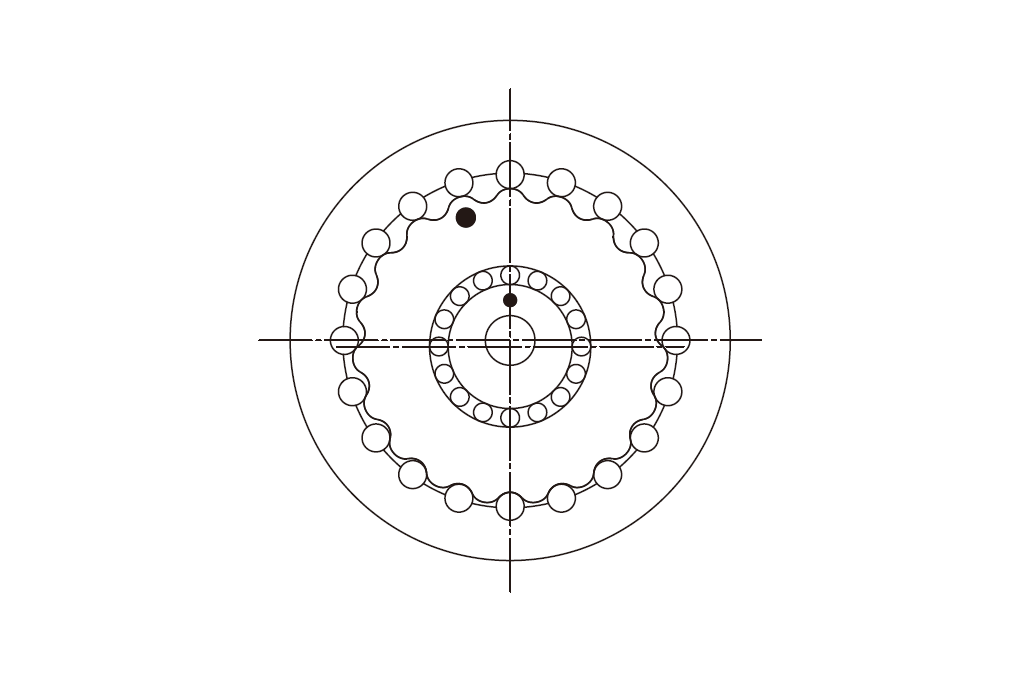
接下来,如图2所示,对于公转圆板的1次公转,公转的同时也让它进行θ度的自转,钢球的轨迹会在固定的圆板上画出振幅e的外花瓣型摆线的曲线,在公转的圆板上会画出同振幅的内花瓣摆线的曲线。(或者是次摆线曲线)。
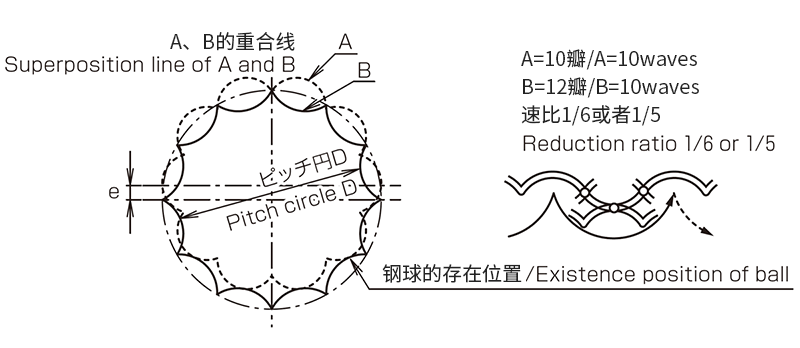
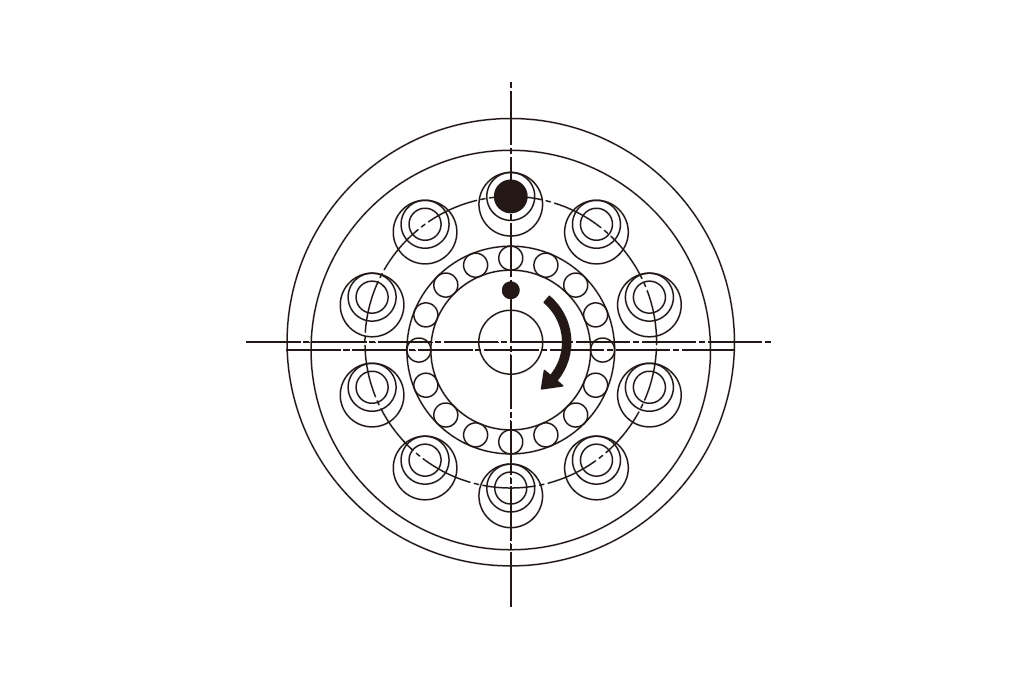
现在把以上想法逆向思维,请参看图3,即一块圆板上加工外花瓣形的摆线沟槽,另外一块圆板上加工内花瓣形的摆线沟槽(沟槽可以允许钢球滚动)。两块板相对,中间夹上钢球。一块板固定,让另外一块板做公转运动,公转圆板发生了与两个圆板花瓣差成比例的自转运动。
这个自转,虽然是图1上加上圆环沟槽的两块板综合运动产生的,基本上还是跟大小两个圆的滚动而产生的自转是完全等价的。
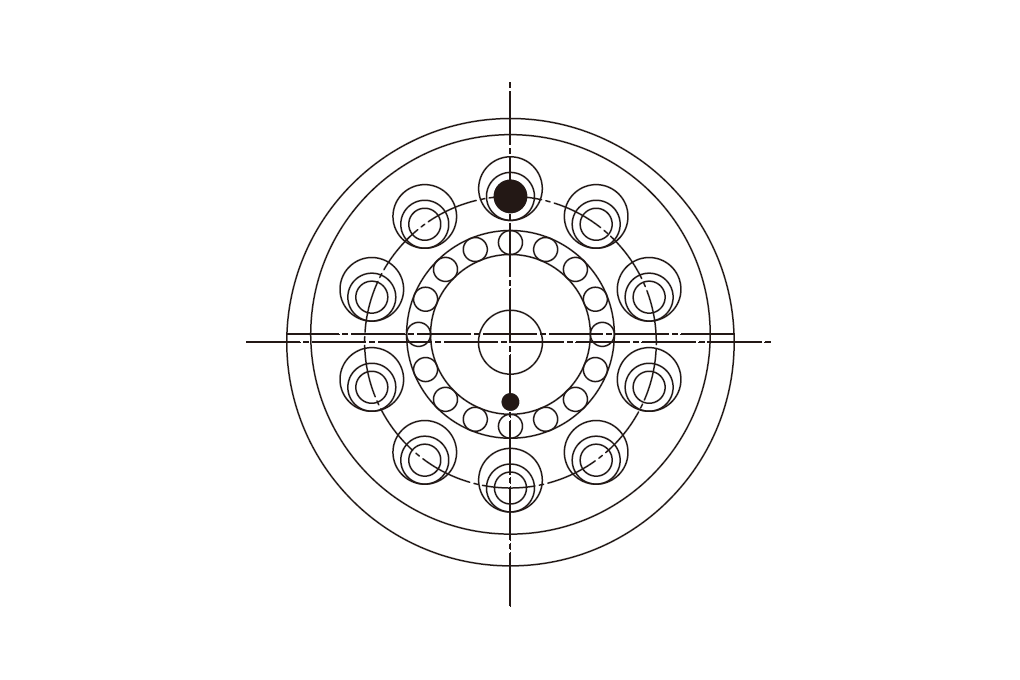
具体的啮合请看图4,内花瓣曲线和外花瓣曲线有数个交叉点产生,在这些位置放入钢球,所有的钢球都自然被位置约束(啮合),钢球滚动的同时,传动的动作和扭矩传递也同时发生。
于是我们就是用其中一块板加工上内摆线曲线的滚槽、另外一边加工上外摆线滚槽,中间夹上作为滚动体的钢球,将一方固定,让另一块板做公转运动,公转圆板就会做2块圆板上摆线曲线波数的差成比例的自转。
如图1,2块圆板夹住钢球,一方固定,另外一方按照偏心量e来进行公转,钢球就会在2块圆板上留下直径e的圆形滚动轨迹。
接下来,如图2所示,对于公转圆板的1次公转,公转的同时也让它进行θ度的自转,钢球的轨迹会在固定的圆板上画出振幅e的外花瓣型摆线的曲线,在公转的圆板上会画出同振幅的内花瓣摆线的曲线。(或者是次摆线曲线)。
现在把以上想法逆向思维,请参看图3,即一块圆板上加工外花瓣形的摆线沟槽,另外一块圆板上加工内花瓣形的摆线沟槽(沟槽可以允许钢球滚动)。两块板相对,中间夹上钢球。一块板固定,让另外一块板做公转运动,公转圆板发生了与两个圆板花瓣差成比例的自转运动。
这个自转,虽然是图1上加上圆环沟槽的两块板综合运动产生的,基本上还是跟大小两个圆的滚动而产生的自转是完全等价的。
具体的啮合请看图4,内花瓣曲线和外花瓣曲线有数个交叉点产生,在这些位置放入钢球,所有的钢球都自然被位置约束(啮合),钢球滚动的同时,传动的动作和扭矩传递也同时发生。
于是我们就是用其中一块板加工上内摆线曲线的滚槽、另外一边加工上外摆线滚槽,中间夹上作为滚动体的钢球,将一方固定,让另一块板做公转运动,公转圆板就会做2块圆板上摆线曲线波数的差成比例的自转。
球减速机的特征、优点
零背隙
动力传动部没有背隙,可以精密传递动力和进行高精度定位。
结构简单、紧凑
减速机构以及输入、输出轴承部内藏于减速机本体,结构紧凑,作为输入、输出同心的减速机,可以简单安装。
免维护
润滑脂封入,免维护。使用途中无需油脂更换。
对应任何电机
可以为客户提供设计制作各个厂家电机的法兰盘。
低噪音
回转部全部是滚动接触,没有敲齿声。
高效率
全部的钢球都参与动力传动,传动效率高,跟滚珠丝杆同样是滚动接触,动作非常轻快。
薄型差动减速机-PSR系列、PSL系列
什么是薄型差动减速机?
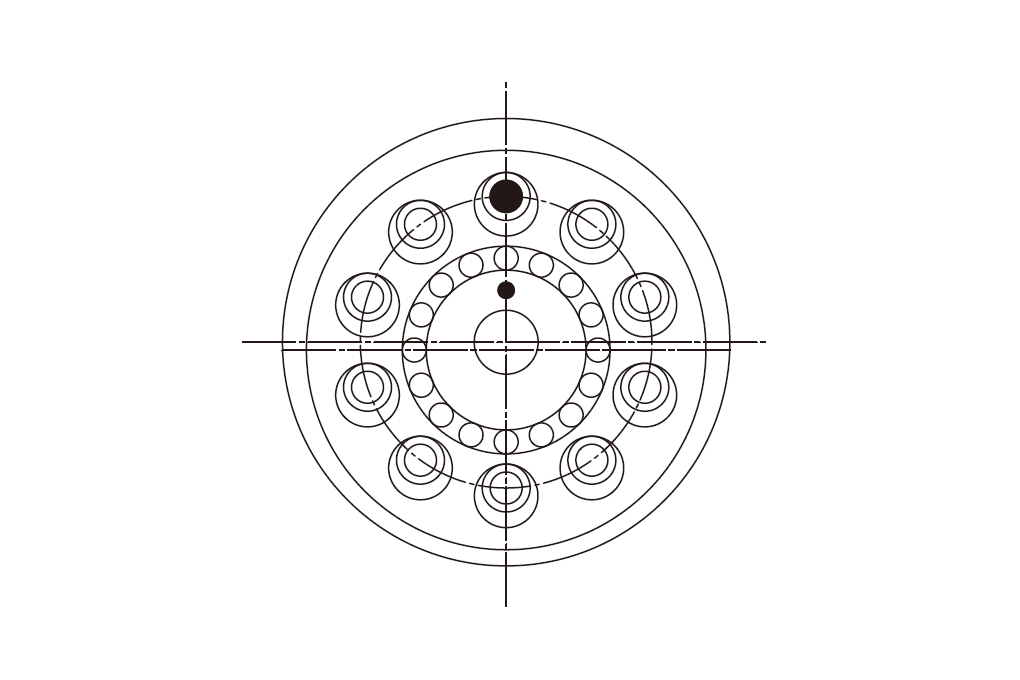
圆周排列的滚子内侧,将两块高信赖度的次摆线齿轮精致、高刚性对向配置,且通过精密滚子&孔的巧妙方式以及交叉滚子轴承的支撑进行输出、实现尺寸超扁平型的超薄型差速减速机。
薄型差动减速机的构造
薄型差动减速机采用差动式减速机机构同和薄型交叉滚子轴承,让实现超扁平的形状成为可能。
另外次摆线齿轮、衬套以及传动销构成的结构,具有很高的啮合率和极高的刚性,可以充分消化负载。动力传动部分的多数部件同时啮合有助于实现高精度。
另外次摆线齿轮、衬套以及传动销构成的结构,具有很高的啮合率和极高的刚性,可以充分消化负载。动力传动部分的多数部件同时啮合有助于实现高精度。
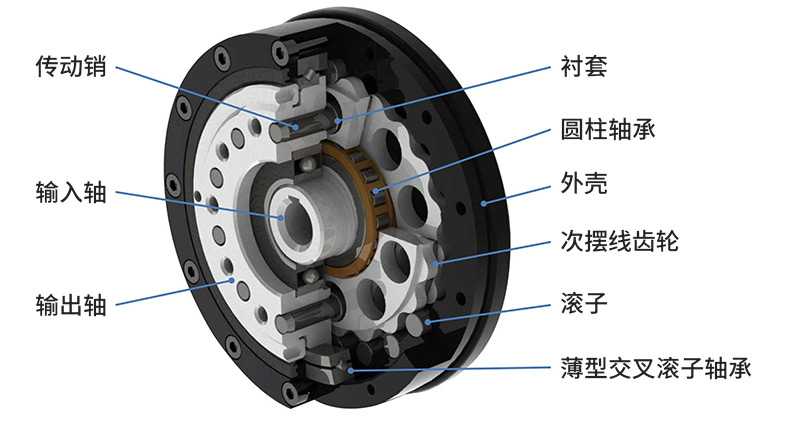
轻量型PSL是在PSR的基础上,把主要的部件11个中的6个部件,材质更改为铝合金,实现了30%左右的轻量化。
薄型差动减速机的动作原理
差动减速机构部
外壳内嵌入可回转的滚销构成内齿轮,和输入轴的偏心部通过轴承支撑的次摆线齿轮成为差速减速机构。
如果让输入轴回转1次,次摆线齿轮公转的同时,还会朝反方向自转1齿的分位。
输入轴和次摆线齿轮的差动量比就成为速度比。
如果让输入轴回转1次,次摆线齿轮公转的同时,还会朝反方向自转1齿的分位。
输入轴和次摆线齿轮的差动量比就成为速度比。
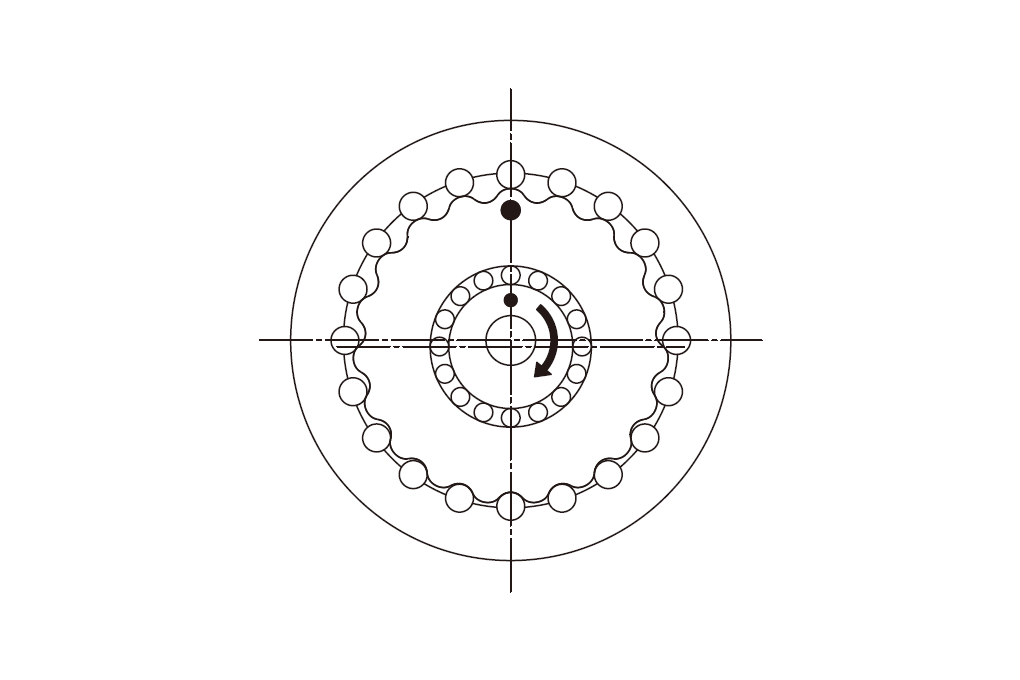
偏心等速机构部
在差动减速机构下发生的次摆线齿轮公转和自转,只有自转传递到输出轴,这是偏心等速机构。
固定在输出轴内的数根传动销镶嵌着衬套,在次摆线齿轮小孔中与衬套接触公转,仅有自转等速地传递至输出轴。
固定在输出轴内的数根传动销镶嵌着衬套,在次摆线齿轮小孔中与衬套接触公转,仅有自转等速地传递至输出轴。
薄型差动减速机的特征、优点
超扁平&紧凑
采用差动式减速机机构同和薄型交叉滚子轴承,让实现超扁平的形状成为可能。
可以为客户装置的轴向尺寸短缩和设备整体的紧凑做出贡献。
高刚性
高啮合率成就高负载和高刚性。
高效率
正确、合适的压力角的设定,实现顺滑的动作和高效率。
高逆向驱动效率
由于该减速机的高效率,从输出轴的逆向输入的传动效率也很优秀。
良好的逆向驱动效率对于近些年处于高速发展的协作机器人、AGV等依靠电池驱动以及人机协作类的机械而言,特殊时候(电池没电或者紧急停止时候),需要人力来恢复原状的时候,该特点非常便利。
低背隙
零部件之间的间隙最优化,可以高精度定位。
轻量(PSL系列)
除了PSR系列以外,将主要11个部件中的6个的材质变更为铝合金(PSL系列),比PSR实现30%的轻量化。